Em uma recente coletiva de imprensa, o Dr. Shin-ichiro Sakai, gerente do projeto SLIM (Smart Lander for Investigating Moon) da Agência Japonesa de Exploração Aeroespacial (JAXA), revelou detalhes impressionantes sobre a missão de pouso na Lua. Esta transcrição completa de suas palavras oferece um olhar profundo e técnico sobre os desafios, triunfos e inovações que marcaram esta notável façanha da engenharia espacial. As informações a seguir, diretas do Dr. Sakai, não apenas iluminam o sucesso da missão SLIM, mas também delineiam o caminho para futuras explorações lunares e planetárias. Aqui está a narrativa completa e inalterada do Dr. Sakai, uma janela fascinante para os bastidores de uma das missões lunares mais precisas e tecnicamente avançadas até hoje.
Tradução do Canal AstroAnimatorVFX – Siga no YouTube @AstroAnimatorVFX
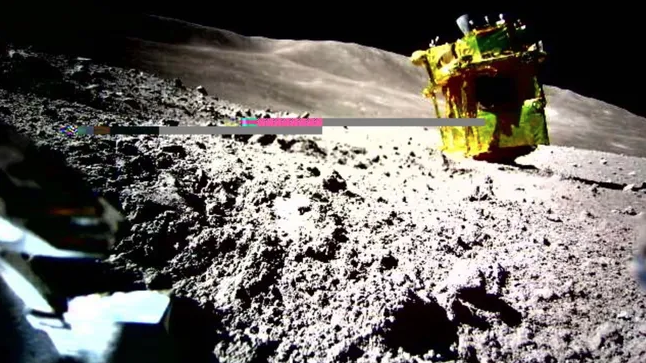
“Gostaria de fornecer um resumo. Primeiro, por volta da meia-noite, começamos a descida de uma altitude de 15 quilômetros. Chegamos a uma altitude de 50 metros e estabelecemos um voo estacionário. Identificamos o ponto de pouso com a câmera e em nosso campo de visão. Em seguida, detectamos obstáculos e iniciamos o pouso em um local a alguns metros de distância. Logo após o início do pouso, um dos dois principais propulsores de 500 newtons foi perdido. Como resultado, a força de propulsão foi reduzida pela metade. Apesar desta situação anormal, o SLIM continuou sua descida, desviando lateralmente. Conseguiu um pouso suave e controlado. O local de pouso estava a 55 metros do ponto alvo. Portanto, confirmamos que foi um pouso de precisão de aproximadamente 100 metros. No entanto, parece que não conseguimos demonstrar um pouso em duas fases. A postura final de pouso foi diferente da esperada. Tivemos sucesso na captura de imagens da superfície lunar com a câmera de divulgação, a câmera de navegação e a câmera multibanda MBC. Além disso, os robôs separados LEV1 e LEV2 realizaram atividades na superfície lunar após serem deixados lá. Em particular, o LEV2 conseguiu capturar imagens do próprio SLIM. Hoje, gostaria de apresentar essas informações a todos vocês. Explicações detalhadas serão fornecidas individualmente pelos responsáveis a partir de agora. Isso é tudo da minha parte.”
“Sim, obrigado a todos por se reunirem em grande número hoje. Meu nome é Sakai e sou o gerente do projeto SLIM. Gostaria de falar enquanto olho para os slides por conveniência na explicação, então peço desculpas por falar em pé. Sim, gostaria de explicar de acordo com este material. Primeiro, na capa, há uma foto que pode parecer casual, mas voltarei a ela mais tarde em detalhes. Esta é uma foto real da superfície lunar tirada pela câmera traseira após o pouso. Também tivemos sucesso em fotografar esta paisagem com um dispositivo de observação química chamado câmera de espectroscopia de multibanda, que está apontando na mesma direção. Assim, essas duas transmissões são dados que foram realmente fotografados na lua após o pouso. Agora, gostaria de explicar sobre o pouso do SLIM em sequência. Por favor, próxima apresentação de slides.”
“Agora, conforme o diretor relatou, o conteúdo de hoje é basicamente o mesmo. Quanto à ordem, primeiro explicarei sobre como o processo de pouso ocorreu, especialmente até uma altitude de cerca de 50 metros. Nesse ponto, é possível avaliar a precisão do pouso de precisão. Depois de discutir essa avaliação, explicarei o que aconteceu após os 50 metros, o que exatamente ocorreu por volta dessa altitude, como a sonda pousou depois disso, e que tipo de operações realizamos após o pouso, bem como nossas perspectivas para operações futuras. Por favor, passem para a próxima página.”
“Sim, primeiramente, isso será uma revisão, mas gostaria de reiterar a visão geral da sequência de pouso. O ponto chave, como vocês provavelmente já sabem, é a utilização da câmera de divulgação para realizar uma correspondência autônoma de imagens, permitindo que a sonda determine sua própria posição com alta precisão. Enquanto isso, a sonda realiza um controle de orientação autônomo para visar um pouso preciso. Como explicarei mais adiante, a sonda realiza um voo estacionário a cerca de 50 metros de altitude, o que também é uma operação autônoma. A partir das imagens da câmera, ela detecta obstáculos e decide qual é o local mais seguro para pousar, e então prossegue para pousar nesse local. Além disso, como informação adicional, a posição da sonda é calculada integrando os dados de aceleração durante o voo, e ocasionalmente corrigida com os resultados da correspondência de imagens. Também realizamos disparos regulares com a câmera de divulgação, então algumas das imagens que mostraremos hoje são o resultado dessas capturas regulares. Por favor, passem para a próxima página.”
“Sim, e agora uma explicação novamente, o local alvo de pouso do SLIM era este. Para aqueles interessados no local exato de pouso do SLIM, embora já tenham visto antes, até agora, tínhamos compartilhado com parceiros como a NASA e a ISRO o local exato de pouso, mas somente com números arredondados ao público em geral. Isso é porque é uma informação muito importante para nós, resultado de um longo tempo de trabalho e escolhido com base nos resultados de observações científicas e na viabilidade do pouso. No entanto, hoje estou mostrando os números mais precisos. Este vídeo, disponível no Twitter, foi feito pelo público. Ele mostra a localização do alvo de pouso do SLIM de uma perspectiva mais distante, facilitando o entendimento. Embora seja uma cortesia deles, mostra onde o SLIM pousou.”
“Acredito que esteja localizado um pouco ao sul do equador lunar. Por favor, passem para a próxima página. A partir daqui, começa a descrição real do pouso. Antes de iniciar a sequência de pouso, que envolve o que chamamos de ‘ação de propulsão’, que é essencialmente a frenagem final, primeiro realizamos algo chamado ‘elevação de imagem’ em três áreas diferentes. Conforme o tempo indicado aqui, isso ocorreu um pouco antes da meia-noite. Em cada área, realizamos duas elevações de imagem e confirmamos que todas foram concluídas com sucesso. Além disso, após incorporar esses dados, fizemos pequenos ajustes na trajetória, o que chamamos de cálculos de orientação. Recebemos um sinal de que esses cálculos foram concluídos com sucesso pela sonda, então, às 23:59, decidimos proceder com a ação de pouso final. Depois disso, às 23:59:58, começamos a desaceleração com os dois motores principais funcionando a plena capacidade, iniciando a sequência de pouso. Por favor, passem para a próxima página.”
“Sim, agora sobre a fase de propulsão, gostaria de simplificar um pouco a explicação. Conforme planejado, realizamos duas correspondências de imagem no meio do caminho, totalizando quatro correspondências de imagem, todas completadas com sucesso. Esses resultados permitiram pequenos ajustes na trajetória, e tudo correu muito bem até esse ponto. Durante a fase de propulsão, ao passar para a fase de descida vertical, que é basicamente descer diretamente para baixo, estávamos a uma altitude de cerca de 6 quilômetros. Estimamos que o erro horizontal era de aproximadamente 100 metros, então o voo foi muito bem-sucedido até aqui, como mostram os dados. Por favor, passem para a próxima página.”
“Após entrar na fase de descida vertical, iniciamos a medição da altitude usando o radar de pouso, e realizamos cerca de duas correspondências de imagem nas altitudes de aproximadamente 4.000 metros e 500 metros. No total, foram realizadas quatro correspondências de imagem nesta fase também, todas completadas com sucesso, permitindo correções de posição muito precisas. Como mencionei antes, perto da altitude de 50 metros, fomos capazes de realizar com sucesso a detecção de obstáculos baseada em imagem. Em seguida, mostrarei as imagens reais, mas neste ponto, a sonda começou a sequência de escolher automaticamente o local mais seguro para pousar com base nas imagens e descer em direção a esse alvo. Então, resumindo até aqui, consideramos que a descida até cerca de 50 metros de altitude foi muito bem-sucedida. Por favor, passem para a próxima página.”
“Até este ponto, gostaria de resumir brevemente os resultados da correspondência de imagem. Conforme mencionei, foram realizadas duas correspondências de imagem em um total de sete áreas diferentes, resultando em 14 correspondências de imagem ao todo. Já informei que todos esses processamentos a bordo foram concluídos com sucesso. Paralelamente, estávamos preparados para detectar rapidamente qualquer anormalidade e, se possível, fornecer assistência a partir da Terra. Para isso, tínhamos um algoritmo diferente no computador terrestre, mais rápido do que o que estava a bordo, como uma espécie de backup. Assim, realizamos a correspondência de imagem também no solo, simultaneamente. Como você pode ver ao comparar os resultados, as correspondências de imagem realizadas a bordo foram muito precisas. Portanto, acreditamos que todas as 14 correspondências de imagem, incluindo o processamento e os resultados de navegação, funcionaram normalmente. Por favor, passem para a próxima página.”
“Quanto à detecção de obstáculos, só podemos julgar com base nas imagens, mas após revisar essas imagens no solo, acreditamos que o processo de detecção de obstáculos realizado a bordo foi normal e que um alvo de pouso final apropriado foi escolhido. Por favor, passem para a próxima página.”
“Abaixo de uma altitude de 50 metros, o design da missão prioriza a aterrissagem com ação de evitar obstáculos em vez de buscar um pouso de precisão. Ou seja, em vez de pousar exatamente no local almejado, a sonda procura um local mais seguro e muda seu curso para aterrissar lá, entrando assim em uma sequência diferente. Portanto, em termos de avaliar o desempenho de um pouso de precisão, planejamos fazer isso com base na precisão da posição ao redor de 50 metros de altitude. Felizmente, o voo foi completamente bem-sucedido até essa altitude, então podemos usar esses dados para avaliar o desempenho do pouso de precisão.”
“Esta é uma visão geral de como as coisas estavam acontecendo. As marcações como CV1 e VLD1 correspondem às imagens capturadas pela câmera durante a correspondência de imagem a uma altitude de cerca de 4 km. Conforme descemos, as imagens de 500 metros de altitude são mostradas aqui. O pequeno ponto vermelho no centro indica o local alvo de pouso. Quando as imagens foram capturadas a 4 km de altitude, o local estava no centro da câmera, indicando que a sonda ainda estava a essa distância. À medida que a sonda se movia, o local alvo de pouso aproximou-se do centro na imagem de 500 metros. Embora seja um pouco pequeno e difícil de ver nesta imagem, há um pequeno quadrado aqui, que é a imagem capturada pela câmera a 50 metros de altitude. A imagem mostra claramente que estamos quase cercando o local alvo de pouso, indicando que estávamos nos aproximando dele de forma muito bem-sucedida.”
“Em relação à distância entre a posição alvo de pouso e o centro da imagem, ou seja, a posição do SLIM, durante o primeiro momento de detecção de obstáculos durante o voo estacionário, essa distância era de 3,4 metros. No segundo momento de detecção de obstáculos, essa distância era de cerca de 10 metros. Portanto, em termos de desempenho do pouso de precisão, acreditamos que conseguimos atingir uma precisão de menos de 10 metros. Por favor, passem para a próxima página.”
“Estas são imagens mais detalhadas dos dois momentos de detecção de obstáculos. A área segura definida pela sonda estava localizada aproximadamente a 10 metros do local alvo de pouso. No entanto, isso é uma questão diferente do ponto de vista do pouso de precisão. O importante é a relação entre estes dois quadros azuis e a posição do local alvo de pouso. Nesse contexto, reitero que a distância no primeiro momento de detecção de obstáculos foi de 3,4 metros e, no segundo momento, estava um pouco mais distante, cerca de 10 metros. Portanto, em termos de precisão do pouso de precisão, acreditamos que foi de cerca de 10 metros. Quanto à imagem do segundo momento de detecção de obstáculos, considerando o tempo e as circunstâncias, essa imagem foi capturada após o início do evento anormal, quando a sonda SLIM começou a se deslocar ligeiramente para o leste. Portanto, acreditamos que a verdadeira capacidade de pouso de precisão alcançada desta vez foi provavelmente entre 3 e 4 metros. Ainda precisamos de mais análises detalhadas, então isso é uma estimativa, mas acreditamos que a precisão do pouso de precisão foi provavelmente entre 3 e 4 metros. Por favor, passem para a próxima página.”
“Conforme expliquei até agora, a sonda SLIM estava progredindo muito bem, mas como mencionado no início, um problema ocorreu por volta da altitude de 50 metros. Especificamente, houve uma anomalia no sistema de propulsão, que pode ser entendida pelos dados do acelerômetro a bordo, indicando a força de empuxo gerada pelo motor principal. Por volta das 00:19:18, o empuxo caiu para cerca de 55%, ou seja, pouco mais da metade. Isso é evidenciado pelo valor acumulado do tempo de injeção do motor principal. Apesar de não haver alterações nas instruções de injeção para o motor principal, a força de empuxo gerada caiu para cerca de 55%. Portanto, acreditamos que o problema ocorreu no motor principal do lado negativo em X, considerando outros dados. Essa conclusão é baseada nos dados de temperatura após o pouso, que mostram que, normalmente, o aumento da temperatura devido ao calor que retorna do propulsor quente, um fenômeno conhecido como ‘heat soak back’, não foi observado no motor principal do lado negativo em X. Isso indica que a anomalia provavelmente ocorreu nesse motor.”
“Na próxima página, por favor. Não tenho certeza se é apropriado dizer ‘felizmente’, mas podemos confirmar com bastante certeza que ocorreu uma anomalia porque a câmera traseira capturou imagens do incidente. Especificamente, são imagens da câmera traseira imediatamente antes e depois da perda de empuxo para 55%. Apesar de estarem fotografando praticamente o mesmo local, um objeto que não aparecia nesta imagem está claramente visível nesta outra. Ao redor, também há vários pontos luminosos que não estavam presentes na imagem anterior. Devido à sua forma distinta, acreditamos que isso provavelmente seja o bocal do motor principal do lado negativo em X que se soltou e foi capturado pela câmera traseira. Como vocês sabem, a sonda SLIM tem este formato, e este lado é o motor principal do lado negativo em X. Pensamos que por algum motivo, a parte do bocal se soltou e caiu, e foi isso que a câmera traseira capturou.”
“Na próxima página, por favor. Ainda não concluímos a investigação das causas do incidente e estamos trabalhando intensamente para entender os detalhes. Portanto, hoje, gostaria de explicar até o que sabemos até agora. Após o lançamento, o motor principal funcionou perfeitamente durante as oito ativações de mudança de curso e durante a fase de propulsão que nos levou até aqui. Uma característica notável do sistema de propulsão do SLIM é o uso do método ‘blowdown’, onde a força gerada diminui à medida que o combustível é consumido. Portanto, acreditamos que a força do motor principal neste momento era de cerca de 50% a 60% do que era no início, após o lançamento. Isso sugere que a carga no motor era relativamente baixa quando a anomalia ocorreu. Além disso, ao comparar o estado dos dois motores, o do lado positivo em X, que estava funcionando normalmente, tinha uma carga maior do que o do lado negativo em X. Portanto, consideramos que a carga no motor problemático era baixa.”
“Estamos analisando vários outros dados, mas até o momento do incidente, não havia sinais de anormalidades na condição de combustão do motor principal. Portanto, baseado no que sabemos até agora, não parece ser um problema com o motor principal em si, mas algo externo que levou ao dano do motor. Em outras palavras, algo aconteceu que resultou na avaria do motor principal. Estamos continuando a investigar as causas. De qualquer forma, consideramos este incidente como muito importante e continuaremos a investigação. Assim que tivermos mais informações, pretendemos reportar de maneira apropriada.”
“Em seguida, gostaria de explicar o que aconteceu com a sonda SLIM após a perda de um dos motores principais. Como mencionei, a sonda estava no meio de um voo estacionário para detecção de obstáculos quando o problema ocorreu. Apesar da perda de um motor, a sonda foi projetada com dois motores principais para garantir certa redundância. Por isso, acreditamos que foi possível evitar uma situação em que o pouso na superfície lunar se tornasse impossível imediatamente. No entanto, com apenas um motor principal funcionando, a sonda só podia gerar força suficiente para contrabalançar a gravidade lunar, tornando difícil controlar completamente a velocidade de descida. Assim, a sonda começou a descer em direção à superfície lunar a uma velocidade relativamente lenta de 2 a 3 metros por segundo, a partir de uma altitude de cerca de 50 metros. Os motores principais são um pouco inclinados, e o design original previa que as forças laterais geradas por cada motor se cancelassem. Mas com a perda de um motor, a sonda inevitavelmente começou a se mover lateralmente. A sonda detectou essa anormalidade causada pela velocidade horizontal e entrou em um modo de emergência. Isso envolveu inclinar um pouco a sonda para minimizar o movimento lateral, enquanto continuava a propulsão com o motor principal restante, prosseguindo com a sequência de pouso. Finalmente, a sonda entrou no modo de pouso. Durante este processo, acredita-se que a sonda foi capaz de liberar os robôs LEV-1, LEV-2 (SORA-Q) a uma altitude de cerca de 5 metros.”
“Acreditamos que, após esses eventos, a sonda SLIM pousou na superfície lunar mantendo-se quase vertical, mas com alguma velocidade lateral. Estimamos que isso aconteceu por volta das 00:19:52. No entanto, sabemos pelos dados que a velocidade de descida no momento do pouso era de cerca de 1,4 metros por segundo. Inicialmente, tínhamos planejado uma velocidade de pouso entre 1,8 e 2,8 metros por segundo, então a velocidade de pouso real foi, na verdade, mais lenta do que o esperado. Isso foi bom em um sentido, mas, infelizmente, a velocidade lateral e a postura no momento do pouso não eram as previstas. Portanto, embora a sonda tenha pousado dentro dos parâmetros de velocidade esperados, a postura após o pouso foi significativamente alterada devido a essas condições, resultando em uma posição final diferente da esperada. Por favor, passem para a próxima página.”
“Estamos estimando a localização exata do pouso da sonda SLIM. Acreditamos que ela pousou aproximadamente 55 metros a leste do local alvo de pouso planejado. Essa estimativa baseia-se nos dados de localização estimados pelos próprios instrumentos da sonda. Acreditamos que esses dados são precisos, pois eles são consistentes com a avaliação posterior baseada nas imagens que mostramos anteriormente, que indicam a posição e a direção do pouso. Portanto, com base na consistência desses dados, estamos confiantes de que a sonda pousou cerca de 55 metros a leste do local planejado. Por favor, passem para a próxima página.”
“Quanto à postura final da sonda SLIM após o pouso, estamos fazendo estimativas com base em diversos dados, incluindo informações sobre a postura. Atualmente, acreditamos que a SLIM está posicionada na superfície lunar da seguinte maneira: a face com os painéis solares está voltada para o oeste. Ou seja, os painéis solares, que estão localizados nesta face da sonda, estão orientados para o oeste na superfície lunar. Esta é a nossa estimativa atual para a postura final da sonda após o pouso.”
“Na próxima página, por favor. Agora gostaria de explicar um pouco sobre as operações após o pouso. Devido à postura da sonda mencionada anteriormente, o sol estava à esquerda, ou seja, ainda no lado leste, quando a SLIM pousou. Infelizmente, percebemos imediatamente após o pouso que não estávamos recebendo energia dos painéis solares. Felizmente, a comunicação com a sonda ainda estava estabelecida, o que significa que a sonda estava operacional. Portanto, iniciamos imediatamente os procedimentos de resposta a emergências que havíamos preparado para tais situações. Os detalhes das operações realizadas após o pouso incluem: seguir a sequência predeterminada de operações, começando com o download de dados coletados durante o pouso, incluindo imagens; desligar equipamentos desnecessários para reduzir o consumo de energia; e desligar os aquecedores. Após essas operações iniciais, a operação foi transferida da estação terrestre nacional para a Deep Space Network (DSN) da NASA, devido ao término do tempo alocado na estação nacional. Em seguida, apesar do tempo limitado, conseguimos realizar operações de observação com a câmera multibanda espectroscópica.”
“Neste ponto, é claro, os painéis solares não estavam recebendo luz solar, então as operações foram realizadas apenas com a energia da bateria embarcada na sonda. Com a bateria se esgotando gradualmente, monitoramos a situação e, às 02:57, realizamos uma operação para desconectar a bateria do sistema elétrico por meio de um comando. Isso efetivamente desligou a fonte de energia da sonda, marcando o momento em que as operações da sonda foram temporariamente suspensas. Gostaria de reiterar que, devido a essas operações de emergência, conseguimos extrair todos os dados e imagens relevantes registrados na sonda durante a descida e o pouso. Portanto, apesar das circunstâncias, conseguimos recuperar todas as informações planejadas.”
“A razão para desconectarmos a bateria é para evitar o que chamamos de ‘sobredescarga’. Se a carga da bateria cair para zero e continuar descarregando, existe o risco de a bateria sofrer uma falha, como um curto-circuito. Se isso acontecesse, nunca mais poderíamos ligar a fonte de energia da sonda. Portanto, seguindo nosso plano original, monitoramos a diminuição da capacidade da bateria e, em um determinado momento, decidimos intencionalmente desconectar a bateria por meio de um comando. Por outro lado, como conseguimos realizar esta operação, se a energia solar se recuperar no futuro, dependendo das circunstâncias, poderá ser possível reiniciar as operações da sonda. É isso que estamos considerando no momento.”
“Quanto aos resultados das operações de observação com a câmera multibanda espectroscópica, realizamos o que é chamado de ‘scanning imaging’, que envolve mudar gradualmente o campo de visão da câmera enquanto captura imagens sequencialmente. Originalmente, planejávamos capturar 333 imagens ao longo de 35 minutos, mas tivemos que interromper a operação após 15 minutos porque a temperatura do transmissor estava aumentando. Como resultado, conseguimos capturar 257 das 333 imagens planejadas e transmiti-las para a Terra. Essa é a situação atual em relação aos resultados da observação com a câmera multibanda espectroscópica.”
“Portanto, a liberação do bloqueio de lançamento do espelho móvel da câmera foi realizada com sucesso, e a operação de mudança da direção do espelho também foi realizada com sucesso. Nos detalhes, a função de gravação automática e a captura de imagem para cada faixa de observação também foram executadas normalmente. Na próxima página, mostrarei imagens compostas a partir das imagens de varredura. Com essas imagens, já identificamos alvos de observação que podem gerar resultados científicos significativos através de observações detalhadas. Portanto, esperamos realizar observações focadas nesses alvos no futuro. Por favor, passem para a próxima página.”
“Na operação de varredura, identificamos cerca de seis rochas que acreditamos serem originárias do manto e não apenas pedras comuns. Se conseguirmos retomar as operações de observação, planejamos focar nesses alvos específicos, realizando observações detalhadas e multibandas com a câmera. Esse será o foco principal das nossas operações futuras.”
“Este caso é semelhante ao anterior. A câmera traseira do lado positivo em X e a câmera espectroscópica têm campos de visão relativamente próximos. Portanto, após o pouso na superfície lunar, combinamos imagens capturadas por ambas as câmeras. Isso requer um certo processamento, pois os locais de captura são um pouco diferentes. As imagens resultantes estão aqui: a área mais larga é a imagem de varredura da câmera espectroscópica, e a área mais estreita e um pouco mais clara é da câmera traseira. Como esperado, as imagens se sobrepõem bem, indicando que tanto a câmera espectroscópica quanto a câmera traseira provavelmente estão funcionando normalmente. Também fizemos uma simulação de paisagem usando dados da Kaguya, e há características de terreno distintas na área. Isso reforça a nossa suposição sobre a orientação atual da sonda SLIM, sugerindo que nossa estimativa de sua posição e direção está correta.”
“Na próxima página, por favor. Quanto às perspectivas de retomada das operações, apesar dos riscos de falha devido ao aquecimento após o pouso, acreditamos que a sonda poderá reiniciar as operações se a energia dos painéis solares for restaurada. Baseado na estimativa de que os painéis solares estão voltados para o oeste, esperamos que a geração de energia seja retomada no final da tarde lunar, possibilitando a retomada das operações da sonda. Como vocês sabem, um dia lunar é muito longo, com 14 dias de luz e 14 dias de noite. Conforme a tarde avança, poderá haver uma chance de retomar as operações de observação. Baseados na nossa estimativa atual, o pôr do sol lunar, que marcará o final das operações, deve ocorrer por volta de 1º de fevereiro. Até lá, estamos preparando para a possível retomada das operações. Esperamos que a sonda inicie automaticamente assim que a geração de energia for restaurada. Paralelamente, estamos tentando estabelecer comunicação com a sonda diariamente por algumas horas. Uma vez que a comunicação seja restabelecida e a operação seja possível, planejamos retomar rapidamente as operações de observação com a câmera multibanda espectroscópica, priorizando os alvos de observação selecionados com base nas imagens de varredura obtidas, e realizar a captura de imagens espectroscópicas sequenciais para obter resultados científicos significativos.”
“Com isso, concluo a apresentação. Gostaria de resumir brevemente. Primeiramente, sobre o resultado do pouso na superfície lunar: até cerca de 50 metros de altitude, pouco antes da manobra de evasão de obstáculos, a sonda SLIM estava descendo para o pouso de maneira muito bem-sucedida. Especialmente as 14 operações de correspondência de imagem realizadas foram todas normais, incluindo os resultados obtidos. Quanto à precisão do pouso de precisão da SLIM, avaliamos isso pouco antes da manobra de evasão de obstáculos, conforme planejado. Felizmente, conseguimos fazer essa avaliação com os dados até agora, e o resultado mostra que a precisão do pouso foi, na pior das hipóteses, menos de 10 metros, e provavelmente em torno de 3 a 4 metros.
Depois, houve um problema na altitude de 50 metros, resultando na perda de um dos motores principais. Apesar disso, a SLIM tinha redundância suficiente para evitar um colapso total e conseguiu continuar o pouso lentamente movendo-se para o leste. Separou dois pequenos probes a uma altitude de cerca de 5 metros e alcançou a superfície lunar. O pouso foi realizado a uma velocidade de descida mais baixa do que o previsto, mas, infelizmente, a postura da sonda no momento do pouso era diferente do esperado devido à superação das condições planejadas de pouso.”
“Quanto ao local de pouso, estimamos que esteja aproximadamente 55 metros a leste do local alvo de pouso planejado. A postura após o pouso, acreditamos, é com os painéis solares voltados para o oeste. Como o sol estava no lado leste no momento do pouso, a geração de energia dos painéis solares foi perdida. Na próxima página, por favor. Após o pouso, embora a comunicação com a sonda tenha sido estabelecida, a falta de geração de energia pelos painéis solares nos levou a seguir os procedimentos padrão de emergência, incluindo a coleta de vários dados e imagens capturadas durante o pouso, e a realização de imagens de varredura com a câmera multibanda espectroscópica. Em seguida, para preservar a sonda, desconectamos a bateria do sistema de energia por meio de um comando. Portanto, a sonda está atualmente desligada. Esperamos que, à medida que o sol se move para o oeste, a energia dos painéis solares seja gradualmente restaurada, permitindo a retomada das operações. Após a retomada, planejamos realizar observações químicas com a câmera multibanda espectroscópica em 10 bandas. Os locais de observação já foram selecionados com base nos resultados das imagens de varredura. Na próxima página, por favor.”
“Até aqui, apresentei o histórico dos acontecimentos, e agora, nesta página, tentaremos resumir o que podemos concluir com base nesses eventos. Apesar da necessidade de avaliações detalhadas dos dados continuarem, acreditamos que a SLIM conseguiu demonstrar a tecnologia de pouso, excluindo a dinâmica de pouso em duas fases, de acordo com os itens experimentais planejados. Em particular, a tecnologia de correspondência de imagem foi comprovada e, como resultado, alcançamos uma precisão de pouso de precisão de menos de 10 metros, provavelmente em torno de 3 a 4 metros. Isso é considerado um grande avanço para futuras missões de exploração lunar e planetária.
Quanto às atividades na superfície lunar após o pouso, a operação dos robôs LEV1 e LEV2 foi confirmada após a liberação, e conseguimos entregá-los com sucesso na superfície lunar. A câmera multibanda também já realizou imagens de varredura, e a integridade do equipamento foi verificada. Portanto, se conseguirmos retomar as operações de observação, esperamos obter mais resultados científicos significativos.”

“Por outro lado, em relação ao evento anormal que ocorreu antes e depois da detecção de obstáculos, planejamos realizar uma análise detalhada para identificar as causas e esclarecer as questões e medidas necessárias. Infelizmente, não conseguimos demonstrar a dinâmica de pouso em duas fases desta vez, mas queremos organizar as tecnologias de engenharia desenvolvidas pela SLIM e prepará-las para serem transferidas para as próximas missões. A equipe do projeto pretende divulgar os resultados das operações futuras, bem como os resultados das análises e das revisões, de maneira oportuna.
Embora apenas cinco ou seis dias tenham se passado desde o pouso, acreditávamos inicialmente que esse tipo de avaliação levaria cerca de um mês. Uma das razões para a rapidez foi a precisão do pouso, que facilitou a identificação do local de pouso. É como procurar uma peça específica em um quebra-cabeça de 100 peças em vez de um de 10.000 peças. O sucesso do pouso de precisão significou que a localização exata do pouso foi determinada mais rapidamente do que esperávamos. No entanto, até agora, nosso foco tem sido determinar a postura e a posição da sonda para operações futuras e esclarecer o que aconteceu a cerca de 50 metros de altitude. Ainda não analisamos completamente todos os dados disponíveis, então, se descobrirmos algo novo, pretendemos informar a todos em um momento apropriado.”
“Na próxima página, por favor. Como mencionei anteriormente, embora não entrarei em detalhes agora, acreditamos que a maior parte dos objetivos de demonstração de engenharia que esperávamos alcançar com a SLIM foi realizada. No entanto, ainda há aspectos que exigirão investigações adicionais no futuro. Na próxima página, por favor. Isso conclui o relatório sobre a SLIM. Gostaria de expressar minha gratidão a todos que nos apoiaram ao longo deste projeto. Muito obrigado pelo seu apoio.”
“Não deixem de se inscreverem no Canal do YouTube pois é muito importante para o crescimento do projeto. Meu muito obrigado! https://www.youtube.com/c/AstroAnimatorVFX/ “